Hugging Face עושה open-source לרובוט הומנואיד להדפסה תלת-ממדית ב-2,500 דולר
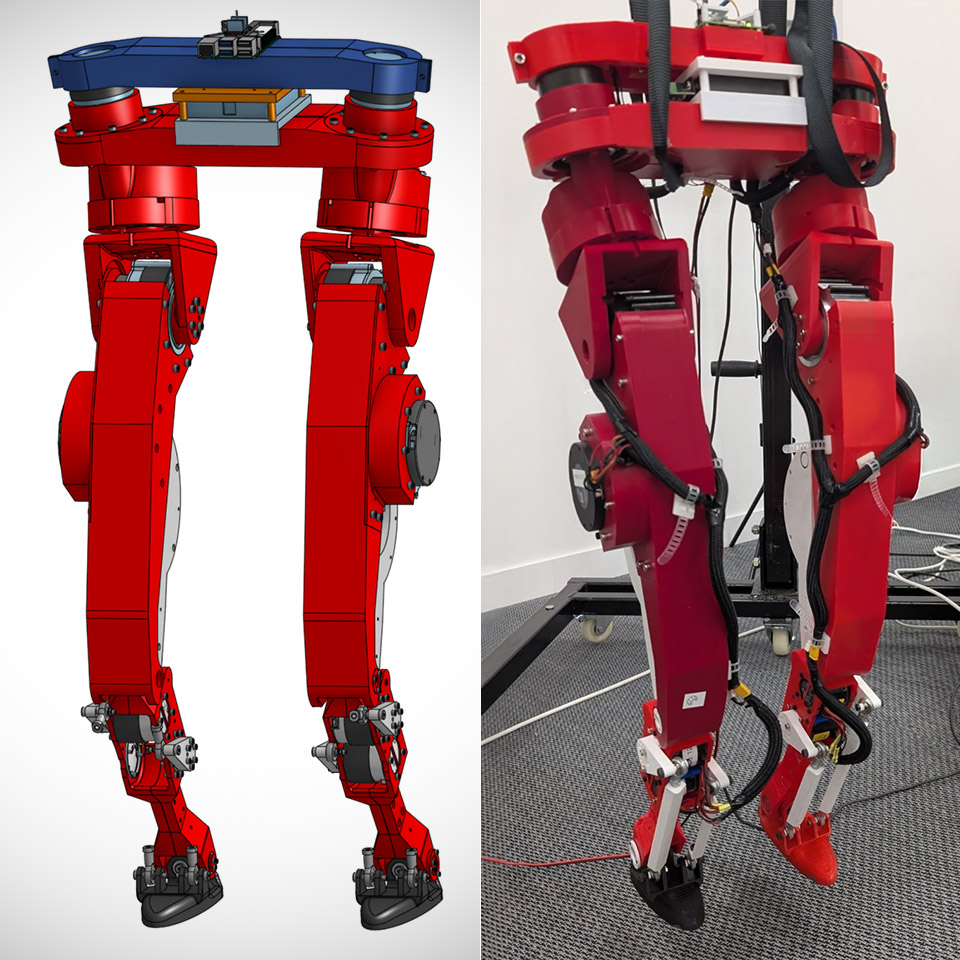
Hugging Face חשפה ב-28 במאי תוכניות open-source מלאות לפלטפורמת רובוט הומנואידי דו-רגלי בעלות חלקים של כ-2,500 דולר — הרחבה של יוזמת LeRobot שלה מזרועות מניפולציה אל פורם-פקטור הומנואידי מלא. התכנון כולל 75 קבצי הדפסת תלת-מימד המרכיבים את שלד הרובוט, אקטואטורים סטנדרטיים מהמדף ואלקטרוניקה זמינה, עם מודל CAD ציבורי ב-Onshape לבדיקה והתאמה.
המסר: כל מי שיש לו מדפסת תלת-מימד, תקציב לאקטואטורים וידע בסיסי באלקטרוניקה יכול לבנות פלטפורמה הומנואידית מתאימה ללמידת עמידה, הליכה ובהמשך גם מניפולציה. בהשוואה ל-Tesla Optimus, Figure 02 או Apptronik Apollo — כולם מתומחרים בעשרות עד מאות אלפי דולרים וסגורים — השחרור של Hugging Face הופך את התשתית החומרתית לדמוקרטית עבור מחקר וחינוך ברובוטיקה. ה-CEO Clément Delangue משך תשומת לב במקביל בפוסט ויראלי ב-X על 'training loop שבור בשקט' בסטאפים של agentic LLM RL — מחזק את ההרגל של החברה להעלות סוגיות מחקר פתוח ושחזוריות לקדמת הבמה.
ההקשר התחרותי: זהו האות הברור ביותר עד כה ש-Hugging Face עוברת מ-hub של מודלים לפלטפורמת חומרה פתוחה, במקביל לאסטרטגיית התוכנה שלה. פלטפורמת המניפולטור של LeRobot כבר זכתה לאימוץ אקדמי משמעותי; ההרחבה ההומנואידית מתוזמנת לרכוב על גל ההשקעות ברובוטיקה של 2026. ביקורת מצד מתרגלים ב-Hacker News: 2,500 דולר זו עלות חלקים בלבד, מורכבות הבנייה בפועל (כיול, תוכנת בקרה, הפעלה בטוחה) גבוהה, ו'ללמד אותו לעמוד' רחוק מאוד מביצוע משימות שימושיות.
כדאי לעקוב: האם תוכניות רובוטיקה אוניברסיטאיות יאמצו את הפלטפורמה בהיקפים נרחבים כפי שאימצו את Turtlebot ו-ROS, והאם Hugging Face תשיק policies של בקרת מנועים ב-open-weight המאומנים על דאטהסט LeRobot שלה.